
Part 4, Passenger Service
In this series so far, Rail Engineer has reported on the tests of Double Variable Rate Sanders (DVRS – a new acronym is born) on a Class 387 Electrostar at the RIDC Melton (issue 157, November 2017), the encouraging results of those trials (issue 163, May 2018) and driver-familiarisation runs on Class 323 units from the Birmingham Cross City line (issue 179, November 2019). If, dear reader, you have detected a pattern, you will be expecting to see a report of the results of those trials – you will not be disappointed!
RSSB, which has sponsored all this work with the support and cooperation of many other organisations, had set up two dissemination events for late March and early April 2020, but due to the national Coronavirus emergency, the events were transferred to webinars, and this is your writer’s first ever report of a webinar!
It was also the first webinar to hold his attention for the whole event, but that’s another matter!
Congratulations to Giulia Lorenzini for organising the technology and to the speakers for mastering the remote presentation technique with little notice.
In-service pilot, option selection
Rail Engineer’s report on the results of the 2017 tests (issue 163, May 2018) signed off with the comment: “The next steps are to implement the results with pace and passion; a significant challenge.” A number of train-operating companies approached RSSB volunteering parts of their fleets to act as host for a service trial (see panel for the list of fleets considered).
Liam Purcell, principal consultant from Ricardo, outlined the process used to select the trial fleet/operator. Feasibility studies were carried out for each fleet covering technical factors such as space, structure for attachment of sand hoppers, whether the electrical and air supplies were sufficient, and the ability to connect to the various controls, such as wheel-slide protection (WSP).
The nature of the operation was also considered, including the route and whether there were already pre-existing performance/adhesion concerns.
Candidate fleets considered for the in-service trial:
- Class 444 (South West Railway)
- Class 172 (West Midlands Trains)
- Class 323 (West Midlands Trains)
- Class 318 (ScotRail)
- Class 320 (ScotRail)
- Class 334 (ScotRail)
- Class 380 (ScotRail)
- Class 321 (Greater Anglia)
- Class 170 (Northern Rail)
The studies showed that it was feasible to fit DVRS to all the candidate fleets, but the West Midlands Trains’ (WMT) Class 323 was chosen because the Birmingham Cross City line is known to suffer autumn adhesion issues and the installation and interface were comparatively challenging.
Three key issues affected the installation: limited space to install the sanders on the intermediate vehicle of the three-car units, potential inhibition of return current caused by additional sand and limited availability of spare units for DVRS fitment.
Return current
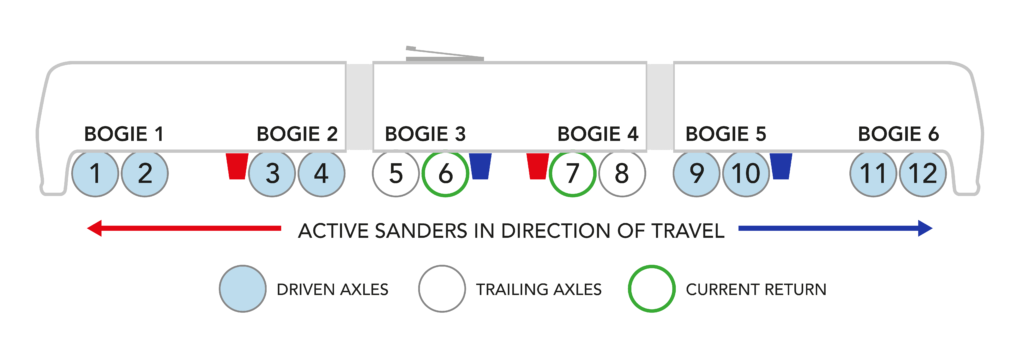
The return-current issue had been identified in the planning for the 2017 tests but was managed as a risk at the time. For this work, the issue had to be resolved. On the Class 323, the primary traction-return axles are numbers 6 and 7 – the inner axles in the intermediate pantograph trailer car.
These are also the axles where the additional sanders were to be located, so there was concern that the extra sand might affect the traction return path.
A practical instrumented test was developed, the first stage of which involved manually applying sand to the running rail and running bogie 4 over it. Bogie 3 has a slightly shorter current path through its cable than bogie 4, so more current flows that way, making bogie 4 the worst case.
The test demonstrated that current was transferred from bogie 4 to bogie 3 as a result of the sand but remained via the traction return axles, so sand was applied manually under both bogies. The level of current returned via alternative paths (not through bogies 3 and 4) was measured with sanding up to 8g/m (above the 7.5g/m limit), current continued to be returned to the running rails via bogies 3 and 4, with rapid deterioration as the sand deposition increased further; a successful test.
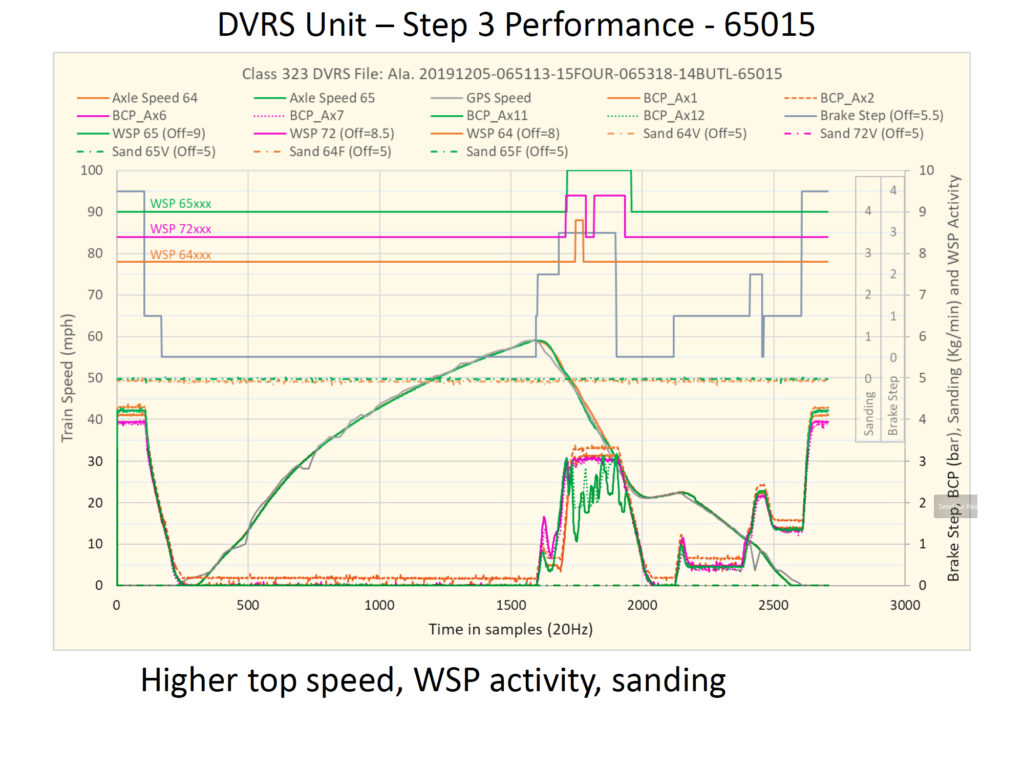
In order to monitor performance of the brakes and the sanding systems, equipment to allow remote condition monitoring (RCM) was installed on both the DVRS units and four unmodified “control” units. This equipment monitors a number of channels at 20Hz (see list) which worked continuously through autumn 2019.
Remote Condition Monitoring Instrumented Systems:
- GPS Speed
- GPS Location
- Brake Cylinder Pressures (x 6)
- Brake Step
- Main Reservoir Pressure (x 2)
- ED Brake Achieved (x 2)
- Direction (x 2)
- Acceleration
- WSP Activity (x 3)
- Sanding Activity (x 4)
- Sand Level (x 3)
- Low Sand Alarm (x 3)
- Cab Speedometer (x 2)
- Cab Active (x 2)
- Doors Open (x 2)
It had been intended to complete the installation for autumn 2018, but the challenges of fitting sophisticated equipment to older trains reared their ugly heads, including noise on the WSP channels, interference on speedometer and door signals, and spurious tripping of circuit breakers.
Class 323 installation
Mick Milhinch, engineering director of AB Rail, part of AB Hoses & Fittings, explained the design and fitment of the DVRS. Mick described his company as the “one stop shop” for all sander system needs. Its Advanced Automatic Sander is a computer-controlled system which is capable of taking any input or logic from the train and configuring those inputs to provide the required sander operation and delivery rate. This is based on two CPUs (central processing units).
CPU 1 (the brains of the system) interfaces with and is mounted on the train – it communicates with CPU 2, which is mounted on the sander raft and controls the sanders. One CPU 1 can control two sander-system rafts (as is the case on the intermediate car). The system is equipped with a data logger, GPS, 4G and Wi-Fi. For the trial, it was interfaced with the RCM system described by Liam.
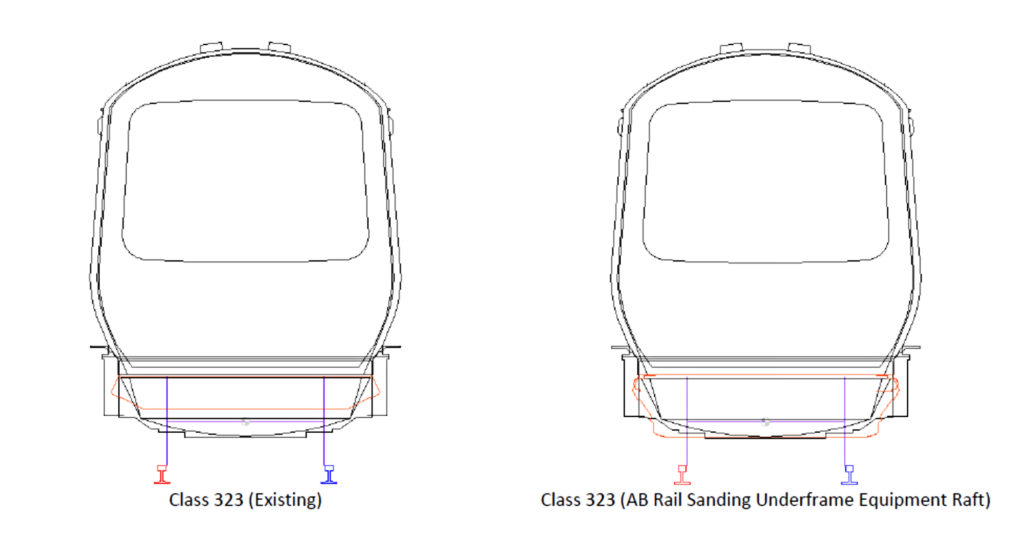
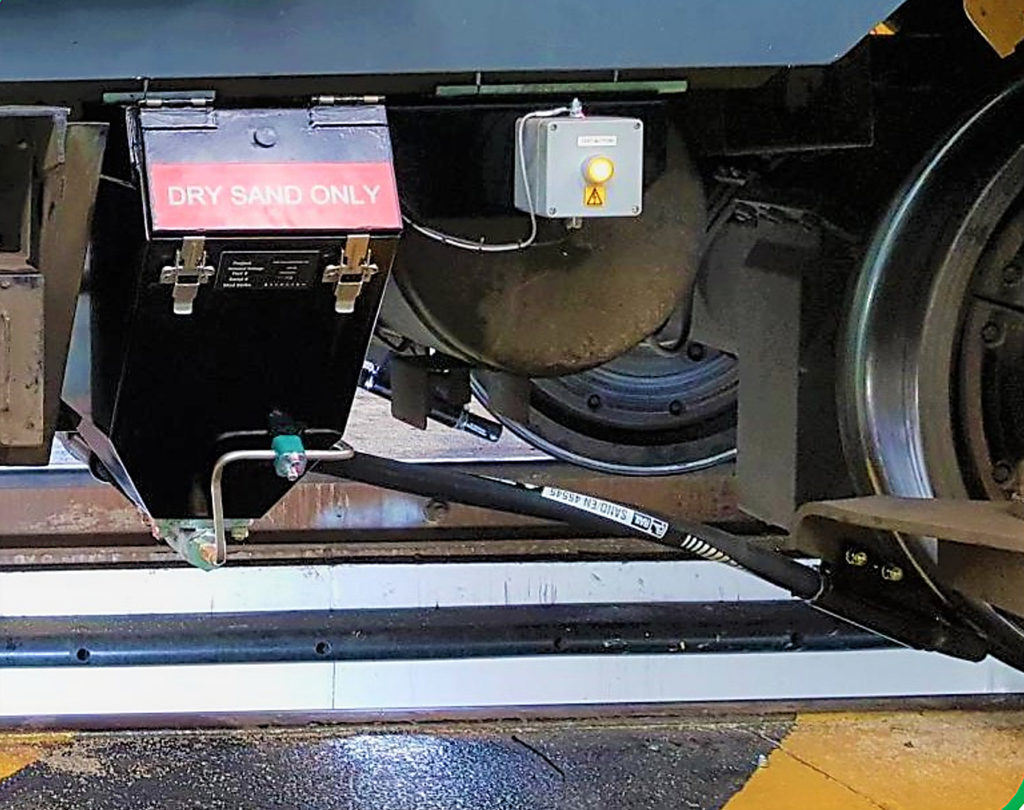
The mechanical parts are all mounted on a raft that fits across the width of the underframe.
Mick said one of the key requirements was to keep the sand dry, and it was decided to double the size of the hoppers to a capacity of approximately 60kg even though sand consumption was not expected to increase. Higher capacity and a sensor to advise sand levels all contribute to reducing the need to open the hopper, helping to keep the sand dry. This did mean pushing the gauge and structural limits.
Mick added that all the efforts to keep the sand dry will come to naught if the air supply is contaminated, adding: “However good you think the train air supply quality is, or are told it is, it won’t be good enough.” Needless to say, the new sander raft incorporates an air filter and dryer.


There was little space available on the intermediate vehicle to install a raft, so a custom design was developed that, for standardisation, was also used on the end vehicles.
The intent was to base the new designs on the excellent original drawings, until the following note was found on the drawing which, putting it politely, sounded a note of caution: “Method of hopper construction to be at the discretion of the fabricator”.
In practice, the existing hoppers deviated significantly from the drawing and the CAD (computer-aided design) model had to be created from scratch, with much double and triple-checking that the vehicles actually conformed to the dimensions on other original drawings.
Installation was also a challenge, simply because of fleet utilisation, but this was overcome by kitting, bespoke transportation, storage and installation equipment pit boards, stillages, skates, lifting frames, jacks etc. and by breaking installation down into discrete packages.
Following installation of each package, the train could go back into service with original sanders still fitted and working until DVRS rafts were installed last of all.
Mick described another unexpected problem, as all four CPU 1 units were exposed to significant over-voltage between the brake 0V and brake-step wires.
These had been designed to cope with 165V on the normal 110V supply, which conforms with EN 50155 and, in AB Hoses previous experience, such protection had been satisfactory. No explanation for the phenomenon was found but the over-voltage protection was increased to 600V and there has been no more trouble. As Mick put it: “Over voltage is believed to be a normal operating characteristic of the class 323 fleet.”
Mick summarised the lessons learned:
Be very, very, very cautious when using historical drawings; trust nothing unless you’ve checked it for yourself against the real thing;
Rafts/hoppers can be made to fit just about anywhere but this needs thought and careful design;
It is possible to install DVRS in and around a normal running and maintenance regime and a full train can be installed between peaks/overnight;
Don’t assume the train works as expected when it comes to interfacing existing and new systems just because the train isn’t failing now – gather real data before designing or else over-engineer!
He also identified two issues that might apply to other fleets. Firstly, the speed signal needs to be accessed for the DVRS system and doing so on an existing vehicle might involve risking the performance of existing train speed signals. He said that AB Hoses is working on a doppler radar speedometer to be incorporated into the raft.
Secondly, it is often necessary to get signals from inside the vehicle end cubicle to the underframe and thence to the rafts where the wiring does not exist and, whilst precedent was set on the Class 323 for using flexible conduit and drilling holes in body end and underframe equipment case, this might not be an option on some of the other classes assessed. He said that his company is working on “power line communication technology”.
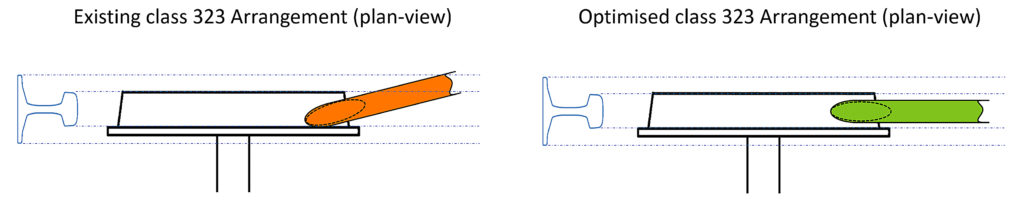
Mick also pointed out the importance of the sand delivery hose alignment. For some reason – lost in the mists of time – the Class 323 delivery hoses had been aligned to fire sand in the direction of the tread/flange area and most of the sand was falling on the ballast. This was noticed but had been assumed to be satisfactory because it had been in service for so long. However, results in commissioning were poor and the hoses were realigned, after which the expected performance was delivered – another lesson in not taking anything for granted!
Mick’s parting shot was “It’s all about the sand! All of the clever design and application comes to naught if the sand isn’t clean, dry and in the nip!”
Train braking
While some modern multiple unit trains have infinitely variable braking, older multiple units have three (or sometimes four) braking ‘steps’. Step 1 is a light brake application, step 2 is a harder application of the brakes, and step 3 is the full-service brake. There can also be a higher-rate emergency brake, used, for example, when an obstruction is seen on the line. Sanding is enabled in steps 2 and 3.
The effectiveness of each step is measured in the deceleration of the train. There are two ways of presenting this – either actual deceleration in metres per second squared (m/s²) or as a percentage of the normal acceleration (or deceleration) due to gravity. This is 9.81 metres per second squared (9.81 m/s²) (32 feet per second per second in old units), so a deceleration of 10% g would be 0.981 m/s².
Each step is designed to deliver at least a defined performance on level dry track and, for example, step 2 might be described as delivering 6% g. In practice, the actual performance depends on gradient, rail conditions, and wheel diameter.
Formula One motor racing fans will have heard commentators talking about the “g forces” that the drivers experience. With light weight, carbon fibre brakes, aerodynamics that promote downforce and wide sticky tyres that won’t slide, they can decelerate at up to five times g (5 g = 49.05 m/s²), compared with a conventional road car that can deliver, at best, 0.8-1.2 times g.
Trains on steel rails slide a lot more easily, so 13% g is generally the best they can achieve, given adhesion levels normally accepted, unless other techniques such as magnetic track brakes are fitted. After that, the wheels lock, the train slides, and deceleration actually decreases – as well as causing damage to the track.
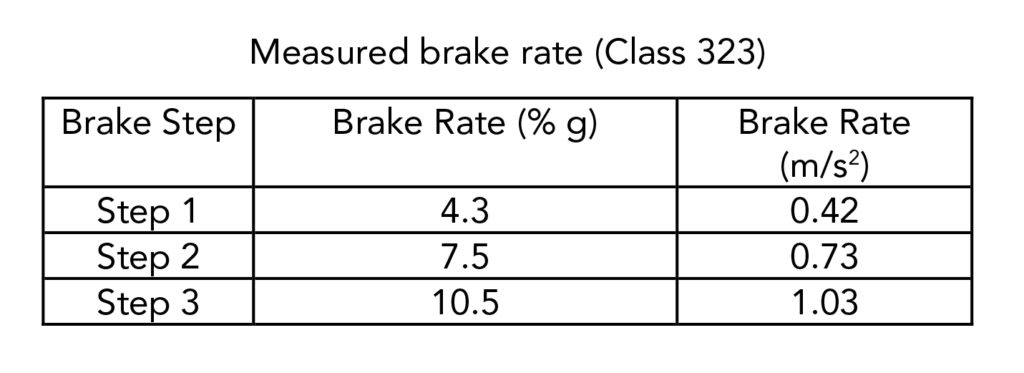
The Class 323 trains in these tests have the three steps plus emergency brake system and the actual results obtained during the tests were:
Measured brake rate (Class 323)

The results
Andrew Lightoller, principal mechanical engineer at DB ESG, continued the story.
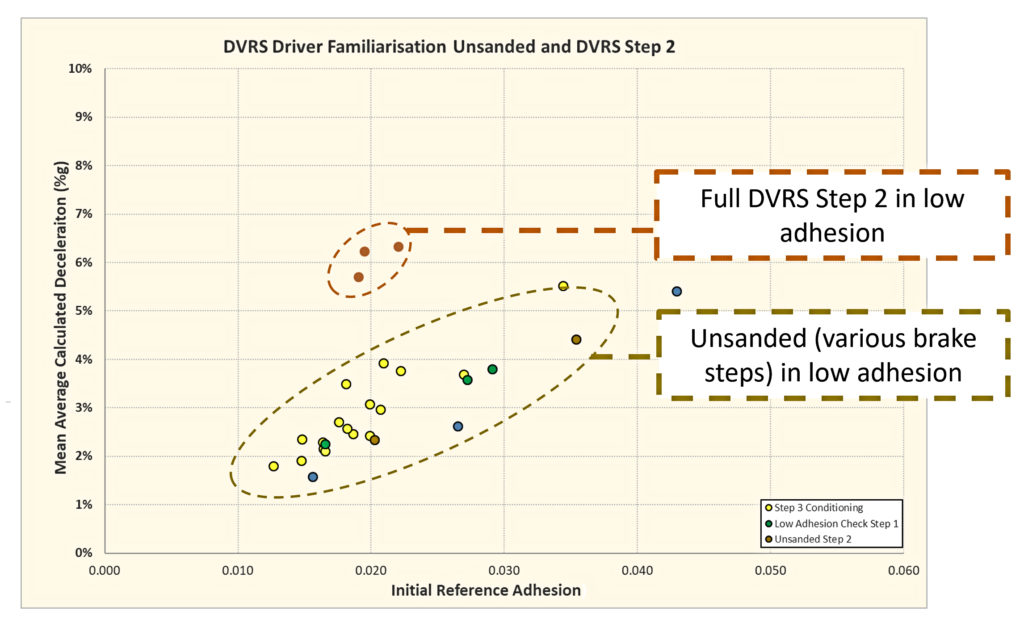
In October 2019, familiarisation runs were carried out on a section of the line just north of Redditch, as described in issue 179. This work was intended to demonstrate the system to WMT’s management and drivers and to give the latter the opportunity to experience DVRS in low adhesion conditions for themselves.
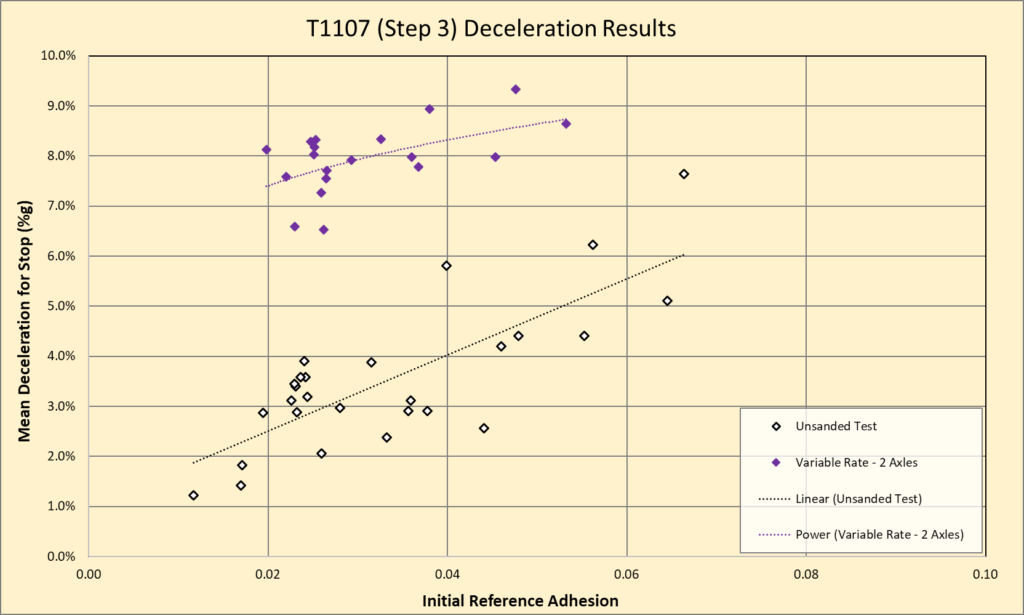
As a by-product, the team was able to evaluate the impact of DVRS controlled by the WSP, compared with the original trials at RIDC where the sanding was manually controlled.
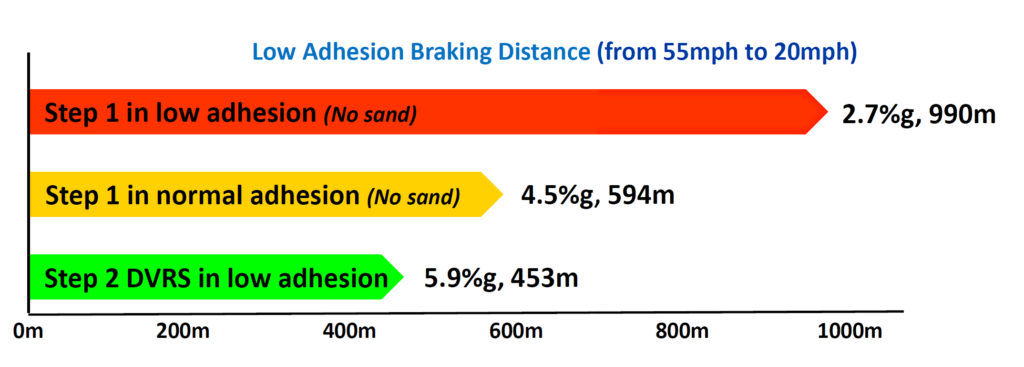
The results were impressive. Compared with unsanded operation in brake step 1 (nominal brake rate 4.2% g), where the achieved brake rate on very low adhesion was, on average, 2.7% g, DVRS operation on very low adhesion consistently achieved a step 2 brake rate around 6% g. This means that the braking distance was approximately halved. Even in low adhesion, Step 2 with DVRS provides a deceleration greater than the nominal step 1 brake performance, which is the assumed brake rate used in the spring and summer to meet the demands of the cross-city timetable.
As reported in issue 179, both drivers and management were impressed with the familiarisation runs and WMT was happy to use the system in service during the autumn season. Some 115,000 qualifying braking events were recorded on the DVRS and the ‘control’ units between October and mid-December 2019. Analysis showed that, of the total distance travelled whilst braking, 94% was under step 1 braking (without sand) and only approximately 5% was under step 2. The percentages were remarkably similar for both the DVRS and the control units.
This indicated that professional driving practices, which encourage step 1 braking, are deeply ingrained. With only five per cent of the braking being above step 1, and thus capable of deploying sand, it was recognised that driver technique needs to change to benefit from DVRS.
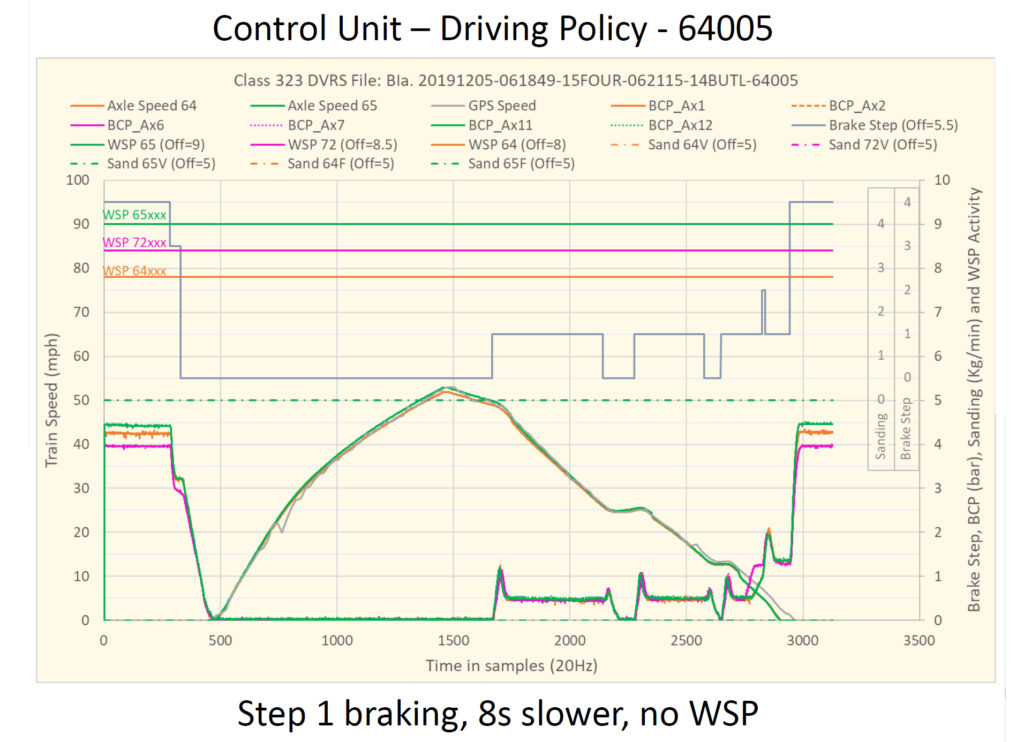
Andrew reported that WMT was keen to confirm benefits following the familiarisation runs. A back to back test run was therefore undertaken on 5 December 2019 – a leaf fall “amber” day – where the rail head looked damp but clean. Unit 323 205 (control) operated using the WMT’s professional driving policy and unit 323 215 (DVRS) operated using full braking capability. There was a single occurrence of wheelslide, but it was not significant.
It was notable that driver confidence in the DVRS was such that the train would typically be driven to a higher maximum speed. This, together with the step 3 brake, delivered a run time improvement of approximately eight seconds between stations.
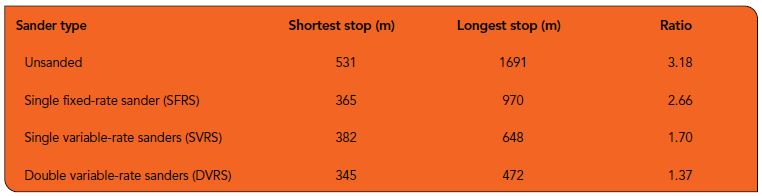
After the presentations, Andrew commented that another benefit of the sanders, whether single variable-rate sanders (SVRS) or DVRS, is in the consistency of low adhesion stops. Referring back to the 2017 trials, the longest stopping distance experienced from 55mph for unsanded low adhesion runs was over three times the shortest. Whereas for DVRS the longest was just 37% higher with other configurations in between, as seen in the illustration and table – see below.
Moreover, the longest stopping distance for DVRS was shorter than the shortest unsanded run.
In summary, this has been a further validation of the benefits of DVRS. A middle-aged train equipped with DVRS delivered performance at least as good as the original sander tests in 2017 and there has been very positive feedback from train drivers. There does need to be a review of professional driving policies to gain the full benefit of DVRS and RSSB is working on this with its partners.
Rail Engineer looks forward to further developments.
Thanks to Paul Gray, Aaron Barrett, and Emma Bassey, RSSB, and the speakers mentioned for their assistance in producing this article